ETNA 2017 – Long Range Navigation Tests (LRNT)
Moon Analogue Navigation Data from the 2017 Mt. Etna Field Test
Welcome to our data set webpage regarding the field test. Please note that due to legal requirements imposed on us, it is necessary to fill out the registration form below prior to accessing the data set.
Description
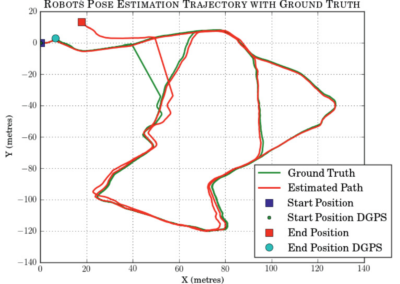
We provide and present two datasets captured with our Lightweight Rover Unit (LRU) at a planetary surface analogue test site on Mt. Etna, Sicily, Italy. In distinction to many other robot navigation datasets, we were able to capture datasets in an environment that is in terms of its visual and terramechanical properties close to the character of surfaces of rocky planets, hence making our data valuable for the development of visual-inertial navigation systems for planetary and unstructured GPS-denied outdoor environments. We make both of our datasets publicly available and free to download for other researchers to use them to test, improve and evaluate their navigation methods. We provide raw data in the form of ROS bagfiles containing gray-scale images, dense depth images, sensor readings from an Inertial Measurement Unit (IMU) and wheel odometry estimates. In addition, the data contains ground truth for the rover trajectory obtained via differential GPS (DGPS) to allow an evaluation of robot localization methods. The datasets were recorded during experiments, in which our rover traversed paths of approximately 1 km in length each. This makes them useful for testing pose estimation methods over long ranges.
Publication:
https://ieeexplore.ieee.org/abstract/document/8470571
https://elib.dlr.de/124514/
Related Work – MADMAX
We used an identical sensor setup (+ additional sensors) in the Sahara Desert of Morocco to record the MADMAX Mars analog data set that is complementary to the Moon analog LNRT.
Get detailed information on MADMAX and have a look into the corresponding Publication.
Corresponding Publication – How to cite us
Vayugundla, Mallikarjuna and Steidle, Florian and Smisek, Michal and Schuster, Martin and Bussmann, Kristin and Wedler, Armin (2018) Datasets of Long Range Navigation Experiments in a Moon Analogue Environment on Mount Etna. In: 50th International Symposium on Robotics, pp. 1-7. ISR 2018; 50th International Symposium on Robotics, 20-21 June 2018, Munich, Germany. https://elib.dlr.de/124514/
BibTex
@inproceedings{dlr124514,
pages = {1--7},
journal = {50th International Symposium on Robotics},
title = {Datasets of Long Range Navigation Experiments in a Moon Analogue Environment on Mount Etna},
author = {Mallikarjuna Vayugundla and Florian Steidle and Michal Smisek and Martin Schuster and Kristin Bussmann and Armin Wedler},
year = {2018},
booktitle = {ISR 2018; 50th International Symposium on Robotics},
url = {https://elib.dlr.de/124514/},
keywords = {Datasets, Mt. Etna, Moon Analogue Environment, Mapping, Navigation, Long Range}
}

Rosbag Information
We provide our data in rosbags. Most of the topics use general message definitions as provided by ros.
The uav_msgs and visual_odometry_msgs are internal message definitions. To use the respective rostopics, you can find the message definitions in the download folder under *rosmsgs_custom*
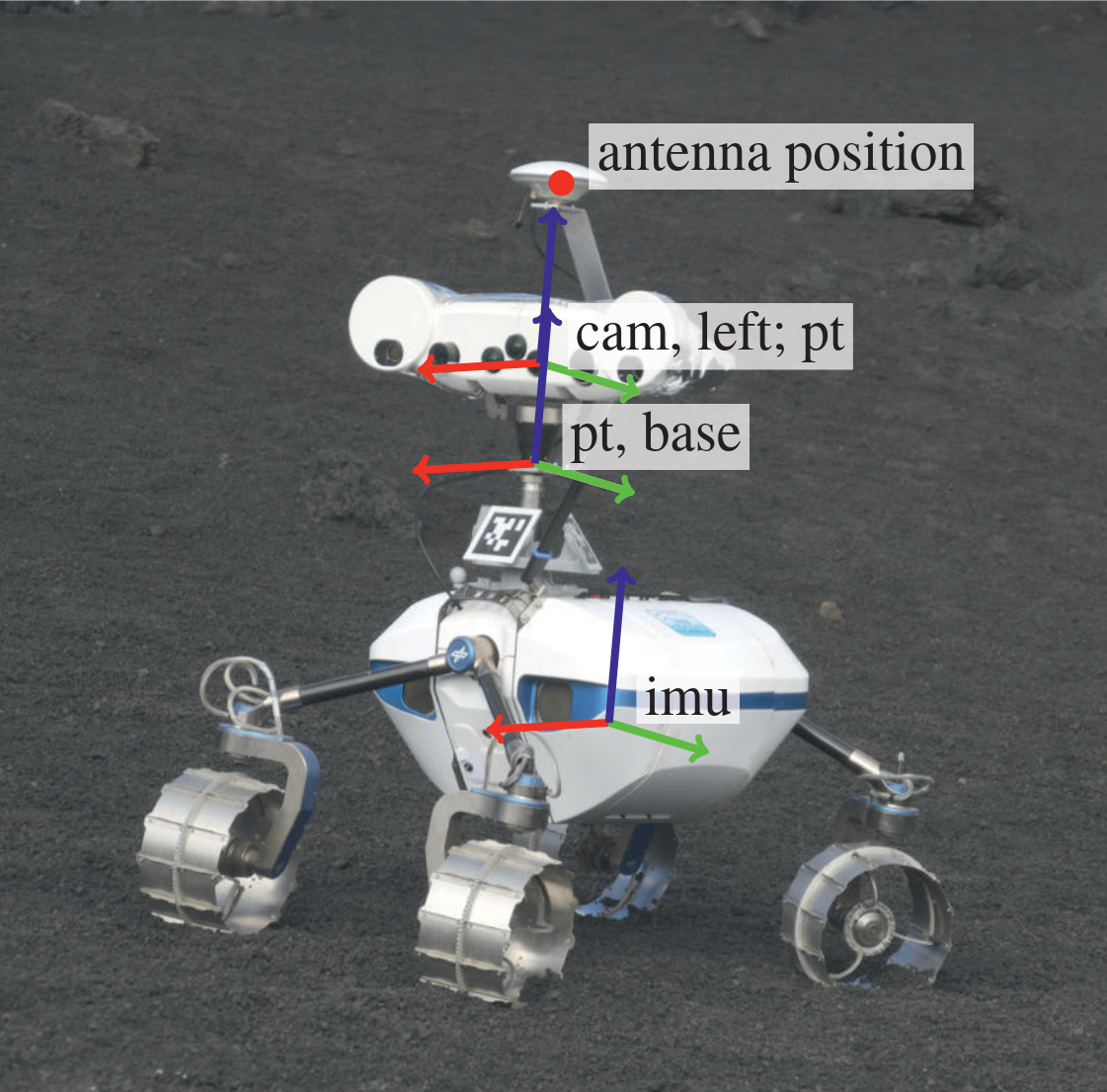
Reference Frames
Calibration
The calibration was done with:
DLR CalDe and DLR CalLab – The open-source DLR Camera Calibration Toolbox
Publications:
List of relevant publications:
- , , , , , , , , , , , & (2021). The MADMAX data set for visual‐inertial rover navigation on Mars. Journal of Field Robotics, 1– 21. Free Access: https://doi.org/10.1002/rob.22016
- Detailed system description of the Lightweight Rover Unit LRU (the technical reference of SUPER):
Schuster, Martin J. et al. (2017) Towards Autonomous Planetary Exploration: The Lightweight Rover Unit (LRU), its Success in the SpaceBotCamp Challenge, and Beyond. Journal of Intelligent & Robotic Systems. Springer. doi: 10.1007/s10846-017-0680-9.
Free Access: https://elib.dlr.de/116749/
Access
To gain access to the full list of sets please fill in. You will receive an email with the details.